



パイロンへの乗り上げ後など、走行中に車体が浮いた後の接地時には突然向きが変わるなど挙動が急変します。
タイヤが路面を離れて一瞬ノーコン状態になった後、再び路面を捉えた際の車体状況(傾き、方向など)が予測できないので制御が難しいところ。
ダンパーセッティングでは走行中の状態を捉えるために、軽く車体を上から押さえた後に離し(または数センチ上から車体を落とす)ダンパーが反発して自然に戻った位置を見ます。
オンロードカーなら、①路面とシャシーのクリアランスが5mm程、そこから車体を徐々に持ち上げタイヤが地面から離れるまでの➁ダンパーの伸びが5mm程度は一つの目安かと思います。
①を稼ぐためにはスプリングを固くする方向、➁を稼ぐためにはスプリングを柔らかくする方向になります。
(車重/使用するスプリングと強弱設定/足回りの稼働範囲などから調整は車体ごとに異なりますし、走行時のスプリング強弱は好みもあると思います。)
今回、私の場合は➁ダンパーの伸びを稼ぎ、車体が浮いた際に少しでも路面を捉えられているようにします。
現在使用しているダンパーはこちら。
ピストンロッドを数ミリ長いこちらに変えて、ダンパー長を伸ばします。
取り外したロッドとの差は、、セットアップを考えれば十分な数ミリだけ長くなります。コートの違いかそれとも摩耗か、光の反射具合が違います。

ロッド交換後の組み立て、調整を容易にするためアジャスターに付けた目印が最上部で正面に向くようダンパートップをずらしながらダンパーキャップを締め込みます。これをしておくと左右ノギスで差を見なくても済み、その場での大まかな調整が楽になります。

交換前のロッドは素材のシルバーが見えている箇所もあり、半年で摩耗が進んでいます。
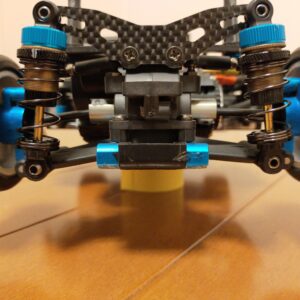
左だけ交換後の比較、車体が浮いた際にはこれだけ路面を捉える差となります。車体は浮かせており、左右ダンパーは最大まで伸びた状態です。
ロッド交換のタイミングや、セットアップ時の参考までに。


コメントを残す